Abstract
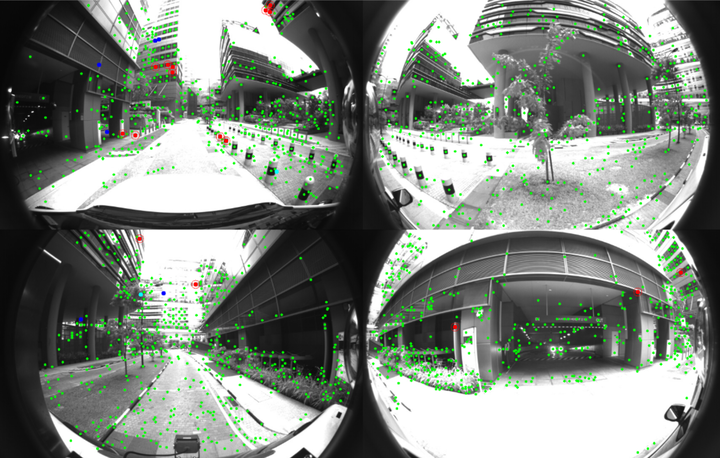
Visual localization,i.e., determining the positionand orientation of a vehicle with respect to a map, is a key problem in autonomous driving. We present a multi-camera visual inertial localization algorithm for large scale environments. To efficiently and effectively match features against a pre-built global 3D map, we propose a prioritized feature matching scheme for multi-camera systems. In contrast to existing works, designed for monocular cameras, we (1) tailor the prioritization function to the multi-camera setup and (2)run feature matching and pose estimation in parallel. This significantly accelerates the matching and pose estimation stages and allows us to dynamically adapt the matching efforts based on the surrounding environment. In addition, we show how pose priors can be integrated into the localization system to increase efficiency and robustness. Finally, we extend our algorithm by fusing the absolute pose estimates with motion estimates from a multi-camera visual inertial odometry pipeline (VIO). This results in a system that provides reliable and drift-less pose estimation. Extensive experiments show that our localization runs fast and robust under varying conditions, and that oure xtended algorithm enables reliable real-time pose estimation.
Marcel Geppert
PhD Student in Computer Science
I’m working on geometric constraints in Computer Vision.