Privacy Preserving Partial Localization
Abstract
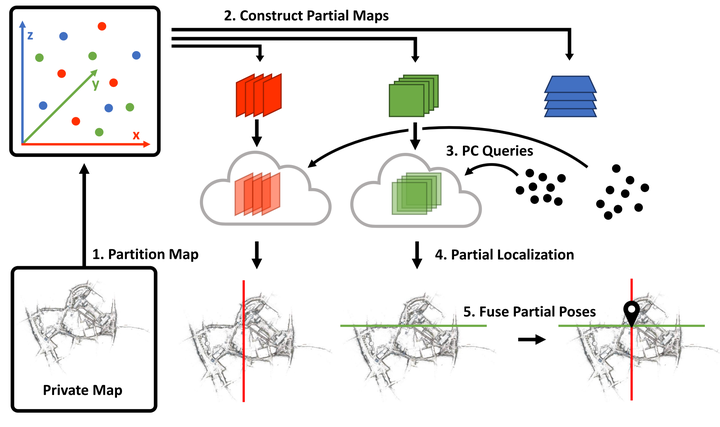
Recently proposed privacy preserving solutions for cloud-based localization rely on lifting traditional point-based maps to randomized 3D line clouds. While the lifted representation is effective in concealing private information, there are two fundamental limitations. First, without careful construction of the line clouds, the representation is vulnerable to density-based inversion attacks. Secondly, after successful localization, the precise camera orientation and position is revealed to the server. However, in many scenarios, the pose itself might be sensitive information. We propose a principled approach overcoming these limitations, based on two observations. First, a full 6 DoF pose is not always necessary, and in combination with egomotion tracking even a one dimensional localization can reduce uncertainty and correct drift. Secondly, by lifting to parallel planes instead of lines, the map only provides partial constraints on the query pose, preventing the server from knowing the exact query location. If the client requires a full 6 DoF pose, it can be obtained by fusing the result from multiple queries, which can be temporally and spatially disjoint. We demonstrate the practical feasibility of this approach and show a small performance drop compared to both the conventional and privacy preserving approaches.
Marcel Geppert
PhD Student in Computer Science
I’m working on geometric constraints in Computer Vision.